CMOS
Matrix Error
Das
erforderliche Prinzip ist die Differenzwerte und Segment-Masken
so zu kombinieren, daß die jeweils isolierten
Störungsstrukturen lokalisiert beeinflußbar
sind, wärend die übrigen Bildanteile möglichst
unversehrt bleiben sollen. Um die verbleibende Reststörung
zu beseitigen, ist eine Gradationsmaske kombiniert
mit der dritten Differenzmatrix
Korrekturmatrix = ( Korrekturmatrix ) * Gradient / alpha
notwendig.
Der Gradient markiert farbsepariert den Hintergrund auf dem das
verbliebene Störungsareal bearbeitet werden soll.
Er steuert den Ort der Korrektur und die Differenzmatrix definiert
den Korrekturwert an diesem Ort.
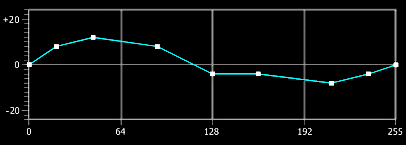
Der resultierende Operator selektiert mit Alpha den Bereich [110...225] und
justiert die Korrekturwirkung - die nicht benötigenten Areale
bleiben unbeeinflußt.
Zur besseren Ansicht wieder invertiert und aufgehellt, sieht das
Korrektur-Profil (Ausschnitt aus Bildmitte) so aus.

Das
dritte Profil korrigiert schon fast vollständig,
sodaß jetzt ein optimierendes Finishing machbar
wäre. Wer jedoch kritisch hinsieht, erkennt noch
die schwache Reststörung auf blau-grauem Hintergrund.
Für unser Beispiel verzichten wir auf die vierte
Korrektur und sind damit auch weniger exakt - es soll ja
nur das Grundprinzip dargestellt werden, wie man mit etwas
Mathematik individuelle Filter anwenden kann.

Zum
Farbabgleich kann man stichprobenartig einige ungestörte
XY-Bildpunkte direkt aus dem "Original" vermessen im Vergleich
zum aktuellen Korrekturergebnis, um festzustellen,
wie sich die Farbwerte durch alle bisherigen Prozesse
verschoben haben. Daraus lassen sich die Farb- und Helligkeits-
Korrekturwerte als Referenz für das gesamte RGB-Abbild
gewinnen. Die Probemessungen zeigen: Die Dunkelareale
müssen etwas angehoben und die hellen Bereiche
etwas abgesenkt werden.
Diese Abweichung
vom idealisierten Original ist die Folgewirkung von nicht optimalen
Korrekturen in einem kleinen RGB-Zahlenraum.
Die Korrektur sollte die originale Farbwert-Gewichtung möglichst
natürlich rekonstruieren.
Hierfür kann man aus den vorherigen Probemessungen eine
Farbwertfunktion erstellen und als Farbtonkurve anwenden.

Abschließend
werden die Gradienten-Pixel auf der gesamten Bildebene
an den Schärfekanten mit einer entsprechend klein
dimensionierten Shift-Funktion verdichtet, um die
Schärfekanten maßvoll zu glätten.
Die Shift-Funktion versetzt die umliegenden Pixel
in Richtung der maximalen Schärfegradienten,
ähnlich wie Distortion oder Morphing.
Das
Ergebnis ist nun ein halbwegs neutrales Master, das
dem ungestörten Original ziemliche nahe kommen
sollte - und ein möglichst neutrales und natürliches
Ergebnis ist stets Ziel einer Rekonstruktion. Danach
kann man nach Bedarf immer noch etwas verschlimmbessern,
beispielsweise die reflektierenden Wassertropfen per
Maskenausschnitt einsetzen. Das aber wäre manuelle
Handarbeit oder verlangt eine komplexere Automatisierung
und die kostet Zeit.

Zum
Vergleich das beschädigte Original ...

Fazit:
Selbst beim CMOS-Error ist nicht alles verloren.
Obwohl wir auf die vierte Korrekturmatrix verzichtet
haben, ist ein brauchbares Ergebnis zu erreichen.
Da
diese Kamera offensichtlich einen konstanten und regelmäßigen
Fehler generiert, bietet sich für weitere Abbildungskorrekturen
eine Automatisierung der Funktionen (RGB,xy) per Script, Compiler
oder per programierbarem Filter an. Ein Filter-Script sollte sowohl
bei Photoshop wie auch bei Gimp oder Corel-Photomaint
machbar sein. Regelmäßige Störungen
mit konstanter Periodizität lassen sich
einfacher automatisiert eliminieren als statistisch
gestreute Fehler. Random-Störungen in allen Farbkanälen,
deren Rauschsignal mit filigraner Bildinformation
variiert und überlagert, erreichen die Grenze
der Machbarkeit einer automatisierten Filterung. km-061,
nvs-067
Hinweis:
Klaus M. ("Astro-Klaus") und Niko v.S. zeigen
in den DIP-Tutorials,
wie man solche Prozesse automatisieren kann und welche
Filter benötigt werden. Voraussetzung ist Interesse
und etwas Programmierkenntnis.
|