IMAGE PROCESSING
Ein Abbild ohne
jede Optimierung, direkt vom Sensor ausgelesen, ist relativ flau in
der Farbgebung und zeigt nicht die Texturschärfe, die man erwarten
würde. Die Ursache hierfür sind charakteristische (lichtabhängige,
temperatur- und zeitabhängige) Unterschiede zur natürlichen Wahrnehmung.
Das Wahrnehmungsspektrum des Sensors hat im langwelligen Rotbereich sein Maximum.
Das menschliche Auge kann den Grünbereich besser differenzieren. Ein Sensor
muß neben der Farbwertung auch Störungssignale korrigieren, die sich
als ein Gesamtrauschen (thermischer Dunkelstrom, Amp Noise usw) zum Eingangssignal
hinzuaddieren. Ein kurzer Überblick soll die DIP-Grundlagen
verdeutlichen.
Die vom Auge als
unnatürlich empfundene Farbwertung des Sensors, das Rauschen und
die flache Schärfe werden durch das Image-Processing korrigierend
ausgeglichen. Die Hauptaufgaben des DIP sind die Kalibrierung der
Helligkeit, die Justierung des Gammafaktors, die Korrektur der Farbwertung,
die Rauschunterdrückung und die Optimierung der Schärfegradienten.
Vor dem Anwenden von
Korrektur- oder Optimierungs-Filtern ist ein Werteprofil der gesamten
Sensorfläche als Funktion von Ort und Lichtwert die Basis für
jede weitere Berechnung.
Diese Zahlenmatrix würde bei Ablichtung einer Normtafel einen
individuellen "Fingerprint" des Sensors erkennen lassen,
denn selbst Sensoren aus gleicher Fertigungsserie sind nie identisch
und haben lokalisierbare Wertedifferenzen. Es bedarf daher einer
neutralen und konstanten Bewertung der Lichtintensitäten,
die dem menschlichen Auge genügen müssen.
Optische Sensorik dient der Transformation für
die menschlichen Wahrnehmung und sie erfüllt damit eine
reproduzierende Funktion. Aber sie ermöglicht auch eine
Expansion der Wahrnehmung im Sinne von Diagnostik bzw Analyse
und trägt so zur Visualisierung der Natur bei. Letzterer
Aspekt geht weit über den Anspruch von Urlaubsbildern
hinaus und macht mit "technischen"
Meßwertprofilen Ereignisse sichtbar, die ohne diese
Wahnungsübersetzung verborgen bleiben.
 |
|
Das
Ausleseergebnis einer sensorischen Bildebene sind solche
Profile. Unabhängig von der späteren
Ausgabe, meistens ein RGB-Format, wird für
jede Photodiode der Farbwert (Intensität,
Helligkeit) und die zugehörige Position
(x,y) ermittelt. Aus der Zuordnung von Orts-
und dem Meßparameter für die Intensität
resultiert jeweils eine 3D-Matrix, die Grundlage für
das nachfolgende Image-Processing ist.
Wenn
der Inhalt einer Sensorebene zeitnahe optimiert
werden soll, dann muß der volle Zugriff
auf die Position (x,y) und den Lichtwert (c)
sehr schnell erfolgen. Die
Bildfolge ist also von schneller Hardware und
effektiver Mathematik abhängig.
Das
Speicherabbild wird ausgelesen und sofort digitalisiert
zur anschließenden Berechnung der Bildpixel
und deren Farbwertung. Die Aufgabe übernimmt
der Periferie-Prozessor mit mehreren Registerspeichern.
Er schreibt die Pixel in den Bildspreicher nach
Vorgabe der DIP-Operatoren. Diese scheinbar
banale Tatsache ist der Vorteil von digitalen
Bildern, denn hinter dem AD-Wandler gibt es
innerhalb der binären Schaltzustände
keine Signalverluste mehr.
Ein
Histogramm sieht ähnlich aus wie die
Ausleseprofile, es hat dennoch nichts gemeinsam
mit dieser Darstellung. Das Histogramm
ist nur die Summe aller Pixel mit gleichem
Farbwert, ohne die Zuordung einer Ortsposition.
Auch ein Igel, der am Stromkabel knabbert,
könnte so ähnlich aussehen.
|
 |
|
 |
|
Mit der
dreidimensional abgespeicherten Werte-Funktion f(x,y,c) können
wir die Extrema und eine lokalisierende Steigung analytisch mit
STINO-Funktionen (StInkNOrmal) berechnen - und was wir sonst noch
benötigen. Die Herleitung der Basis-Funktionen ist einfacher
als man bei so einer numerischen Vorgabe vermuten würde.
Obwohl man diese
Thematik komplizierter dargestellen kann, bedarf es tatsächlich
nur einiger Grundgedanken beim Herumspielen mit den Funktionseigenschaften,
um das Prinzip zu verstehen. Man bewertet oder korrigiert die Bildpunkte
durch möglichst unkomplizierte Funktionen. Die grundlegenden
Filter-Funktionen lassen sich in ihrer Reihenfolge veranschaulichen:
|
|
|
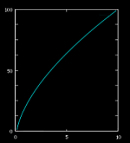
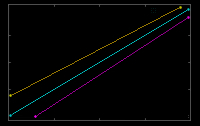
Der
einfachste Filter dient dem Helligkeitsabgleich:
Diese Funktion ist eine Gerade f(x,y)= a(z+z0)+b,
wobei z die Farbwertvariable ist. Sie limitiert
an jedem Pixelort f(x,y) das gesamte Helligkeitsspektrum
und sie kalibriert die Extrema der Farben
auf den Schwarz- und den Weißpunkt.
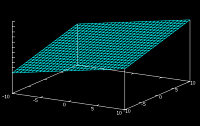
Diese Farbwert-Funktion ist ortsunabhängig,
weil sie auf der (x,y)-Ebene des Sensors konstant
sein muß. Eine ortabhängige Geraden-Funktion
ist eine Ebene im 3D-Raum, wie etwa f(x,y)=
a(x+y)+b. Sie würde auf der Sensorfläche
eine kontinuierliche Änderung der Helligkeit
bewirken. also eine Art Gradient-Effekt. Ein
wenig Herumspielen
mit den Funktionen verdeutlicht die Vorstellung
zur praktischen Auswirkung.
|
|
|
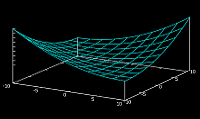
Die
Gammafunktion f(x,y) = m(z+z0)^a+b, mit einem
Exponenten a>1 oder a<1, kann variabel
angepaßt werden. So eine Funktion ist
sowohl für die Gamma-Korrektur wie auch
für die Kalibrierung der Helligkeit (wie
Black/White-Balance bei Geradenfunktion) verwendbar.
Die separierte Anwendung auf jeden Farbkanal
ergibt den Filter für die RGB-Farbkorrektor.
Als ortabhängige Exponential-Funktion erhalten
wir gekrümmte Flächenprofile wie
bei f(x,y) = (x+y)^a und exponentielle oder
rotations-symmetrische Ortsprofile können
zur lokalisierten Korrektur von optischen
Störungen verwendet werden.
|
 |
|
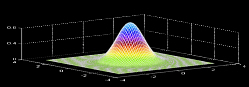
Mit
+/- a*exp(-b*x^2-c*y^2))+d erhält man schon eine dreidimensional
justierbare Gauss-Funkion, die auf der (x,y)-Ebene den Ort lokalisiert
und auf der z-Koordinate die Farbkorrektur enthält.
Die Abarbeitung
eines gekrümmten Profiles ist auf unseren dampf-betriebenen
Rechnern
fast so schnell (ca. +16% bei 7200x5400px) wie die einer geraden
Ebene, obwohl für jede Position der Exponetialoperator abgerufen
werden muß.
|
Die Wirkung der
2D-Funktionen kann man entweder durch
Experimentieren
oder mit der Gradations- oder Tonkurve in nahezu jedem Programm für
Bildaufbereitung selbst austesten. Ein Beispiel zu den dreidimensionalen
Ortsfunktionen f(x,y,c) wäre die Vignettirungskorrektur, die man mit
einem Polynom, der Gauss-Glocke oder einfachen Quadrat-Gleichungen und
ähnlichen Funktionen justieren kann.
Black/White-Balance,
Gamma- und Farbkorrektur sind mit diesen handlichen Funktionen gut
realisierbar. Je einfacher die Grundfunktionen, desto schneller die
Belichtungsfolge. Es fehlen für ein grundlegendes Image-Processing
noch die Filterfunktionen für Noise-Reduction und Sharpening. Beide
Filter sind nicht realisierbar ohne die Berechnung eines lokalisierenden
Gradienten.
[
weiter ... ]
|