IMAGE PROCESSING
Der
Gradientienfilter hat die Aufgabe das Wirkungsareal für
Farbwert-Funktionen als Ortsprofil zu markieren. Hört
sich kompliziert an, ist es aber nicht. Den Gradientienfilter
kann man sich in jedem Bildbearbeitungsprogramm ansehen,
wenn man die Option "Kanten- oder Ränder suchen"
bzw "vektorisieren" auswählt. Wie entsteht
so ein Gradientenprofil ?
Gehen
wir zunächst von einer formalen Ableitung aus, dann
ist diese der Grenzwert einer Ortsdifferenz mit zugehörigem
Funktionswert als Output. Der Parameter h ist der Versatz
der Ortsposition.

Definieren
wir für die Ableitung eine symmetrische Ortsdifferenz
mit h=1, dann erhalten wir einen Gradienten für die
x-Richtung zum nächsten Pixelnachbarn, also einfach
die Steigung einer Verbindunggeraden zwischen (x-1) und (x+1).

Wenden
wir den Gradienten auch in y-Richtung an, dann sieht die funktion
so aus:

und es
zerlegt sich der Gradient in zwei Komponenten jeweils für
die x- und die y-Richtung.
Beides
komponentenweise angewendet, wäre so etwas wie ein
Nabla-Operator, der nur die Differenzwerte in beide Richtungen
erzeugt. Betrachten wir p als einen Farben-Parameter, dann liefern
die Ortsdifferenzen die zugehörigen Farbwerte an
der Position (xi,yi) auf einem 2d-Ortsfeld.
Dieser
Term ist ein einfacher Kreuz-Operator und an jedem beliebigen
3x3-Ausschnitt der Bildmatrix läßt sich wiedererkennen,
daß wir jetzt ein Maß haben für die richtungsabhängige
Helligkeitsänderung, jeweils für zwei auseinanderliegende
Pixel. Die x-Ableitung stellt demnach eine Farbdifferenz
zwischen den Pixelwerten p21 und p23
dar, die y-Ableitung liefert die Farbdifferenz zwischen
p12 und p32.
Kombiniert
man die Ortsmatrix P mit Gewichtungskoeffizieten G zu
p(ij)*g(ij), so führt das in Summation auf die Darstellung
einer Faltungsmatrix M und mit Normierung erhält
man einen Term der Form

wobei
P jetzt nur noch den Ort mit Farbdifferenzwert definiert
und G diesem Ort einen Gewichtungskoeffizient bzw einen
Korrekturfaktor zuweist. G kann eine Funktion von (i,j)
sein oder eine Konstante, mit der man beispielsweise eine
symmetrische Verteilungsfunktion nachbilden kann. Der
Operator M(P,G) ist auch als benutzerdefinierter Convolutionfilter
bekannt, ein Matrixfeld-Filter, in dem man die Koeffizienten
direkt einsetzt. Mit so einer Faltungsmatrix lassen sich
die Ableitungen wiefolgt abbilden.
Die
Wirkung der beiden Operatoren (dx,dy) ist auch nicht so
fremd, wie es einscheinen mag. Sie entspricht der eines
Relieffilters, einmal für 0° und einmal für
90°. Zur Herstellung des Gradientenprofiles ( Gradientenmaske
=> beide Relief-Operatoren) benötigen wir noch
den Gradientenbetrag als Intensitätswert für
die lokale Steigung.

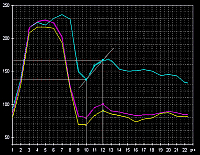
Qualitativ
hochwertige Filter, verwenden andere Terme für
den Intensitätswert und sehr schnelle Filter
(Low Level Camera Processing) bilden nur die Betragssumme
oder Geradenabschnitte.
 |
 |
| Betragsgerade |
Geradenabschnittsprofile |
 |
 |
| Exponentialfunktionen |
Exp-Bandpass-Funktionen |
Damit
ist der Gradientenfilter auch schon anwendbar. Die
Richtungsfunktion arctan(y/x) hat als Steigungswinkel
für das Sortiment der Grundfilter in der Praxis
meist keine weitere Bedeutung. Komplizierter wird
es erst, wenn ein besonders hohes Maß an Signalreinheit
bei maximaler Verstärkung realisiert werden soll.
Nach
dem Grundprinzip der Faltungsmatrix generiert die
Kamera den durch das Gradientenprofil lokalisierten
Sharpen-Filter. Die Bildschärfe ist dabei grundsätzlich nur
eine Kontrastanhebung zweier nebeneinander liegenden
Pixel. im einfachsten Fall realisiert durch eine
Geradenfunktion mit Steigung m>1. Das Gradientenprofil
markiert den Ort, wo die Kontrastierung erfolgen soll, und
der Matrix-Operator erfüllt die Kontrastierungseigenschaft.
Ein
Faltungskern K(ij), der nur im Zentrum einen positiven
Koeffizienten aufweist, aber umgeben ist von nagativen
Koeffizienten, erzeugt eine Kontrastverstärkung. Nagative
Koeffizienten haben die Wirkung eines Inverters für den jeweiligen
Pixelort in Relation zum positiv bewerteten Bildpunkt im Zentrum.
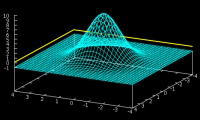
Das
Gegenteil der lokalisierten Schärfe ist ein Blur-
oder Smooth-Filter. Dieser Weichzeichner kann ebenfalls
mit dem Convolutionfilter erzeugt werden, in dem man eine
Koeffizientenverteilung wählt, die etwa der einer
Gauss- oder Lorentzfunktion entspricht:
 |
|
 |
Je
nach Breite der Gaussfunktion ist damit der Anteil
des motivabhängigen Rauschens (Lichtverteilung,
Farbdifferenz) und das thermische Rauschen (z.B. bei
Langzeitbelichtung) herauszufiltern. Genaugenommen
ist der "dynamische" Rauschanteil physikalisch
temperatur-, zeit-, helligkeits- und farbfrequenz-abhängig,
das "statische" Rauschen ist vorgegeben
durch die Verstärker-Komponenten und die Fertigungspräzision
des Sensors. Mathematisch aber ist die Gesamtstörung
nur abhängig vom Ort und der Intensitätstoleranz.
Die Gaussbreite wird auf den mittleren Abstand der
Störung (Ortsfrequenz) und auf die Toleranzhöhe
(Rauschpegel) abgestimmt. Der Nachteil des Gaussfilters
ist ein Detailverlust in dieser Periodizität.
Reduzieren kann man den Detailverlust durch Kombination
des Gaussfilters mit dem invertierten Gradienten.
Das Gradientenprofil als Lokalisierungsmaske wird
für den Sharpen- und auch für den AntiNoise-Filter
benötigt.
[
weiter ... ]
|